


Project information
- Title: eBAJA - All terrain electric vehicle
- Guide: Prof. R.K. Mandloi
- Project timeline: Mar '19 - Jan '20
- Project Files: Steering Report & Ackerman Optimization
Abstract
Designed and fabricated an all-terrain electric vehicle to participate in SAEINDIA eBAJA 2020. Secured and All-India-Rank 10 in the Virtuals round of eBAJA 2020.
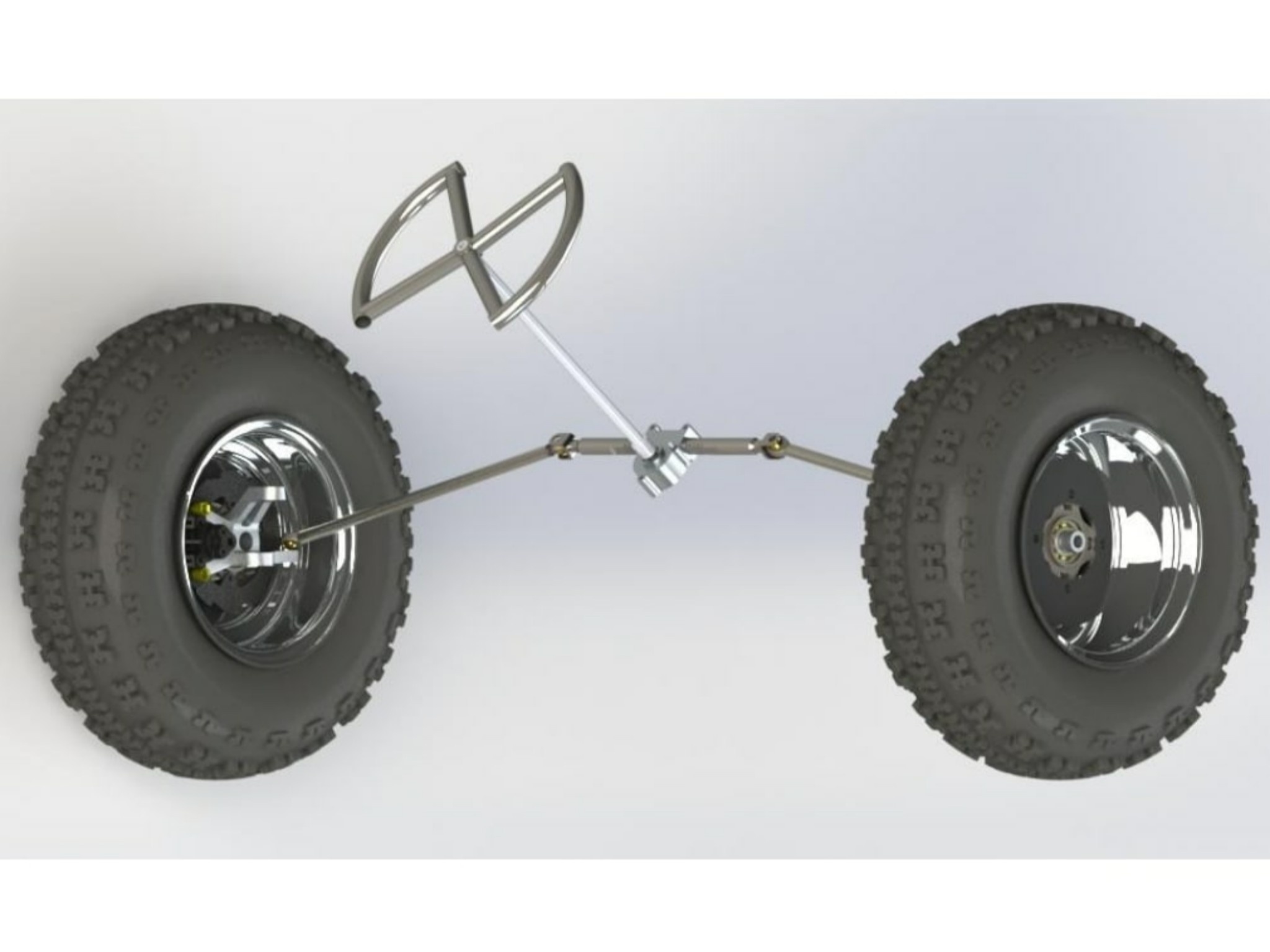
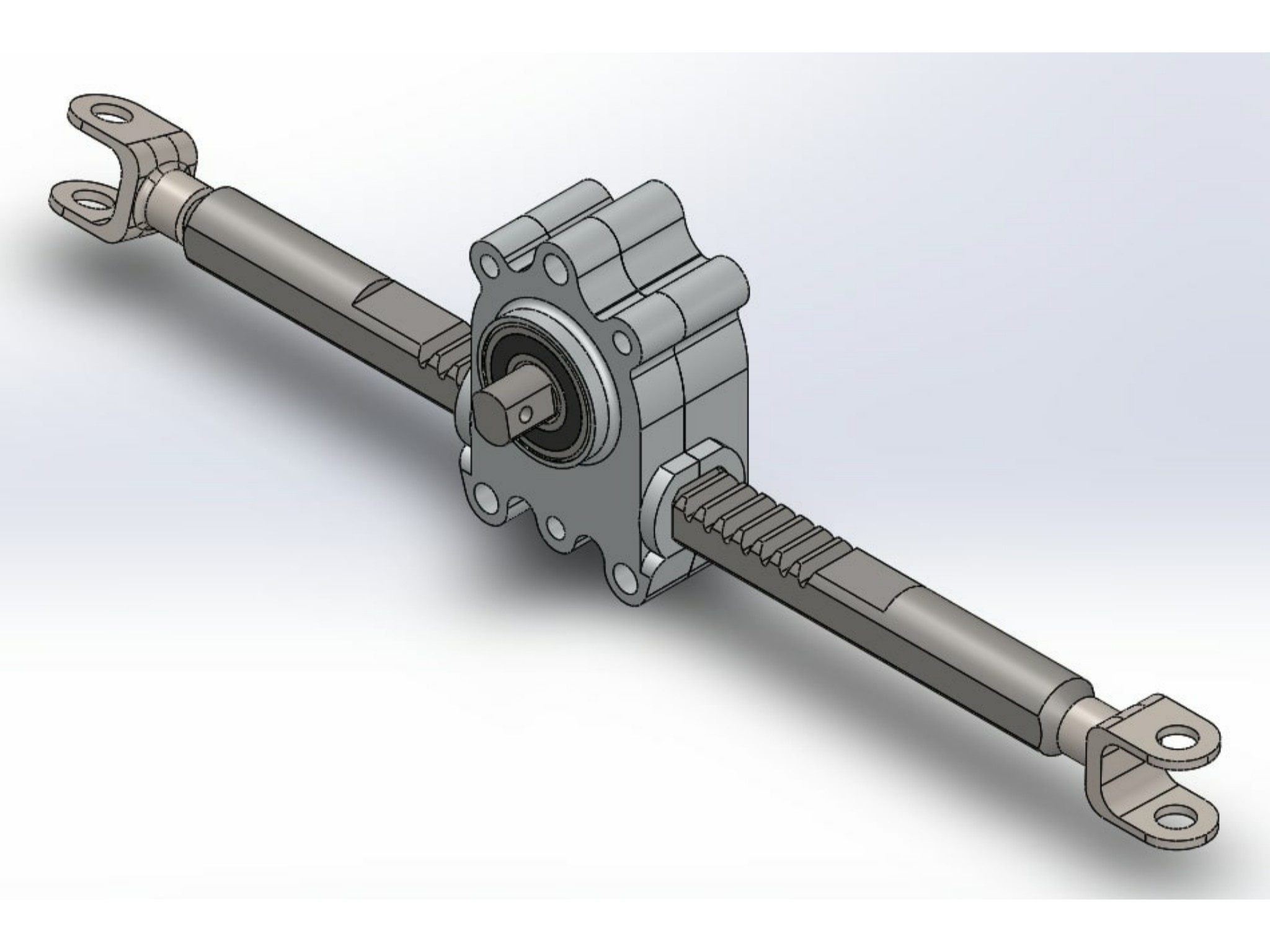
Achieved an Ackerman percentage of 104% with a steering ratio of 128 mm/rev for a turning radius of 1.5 m.
Used Reverse Ackerman geometry to minimize bump steer, avoid buckling of tie rods and increase the brake and accelerator pedal installation space.
Skills involved:
- ANSYS
- SOLIDWORKS
- MSC Adams (Car)
- Python