
Project information
- Title: Analytical modeling and FEM simulation of a rotating hyperelastic spherical balloon actuator
- Guide: Dr. Deepak Kumar &
Dr. Vinod Yadav - Project timeline: Oct '20 - Apr '21
- Project Files: GitHub Repository
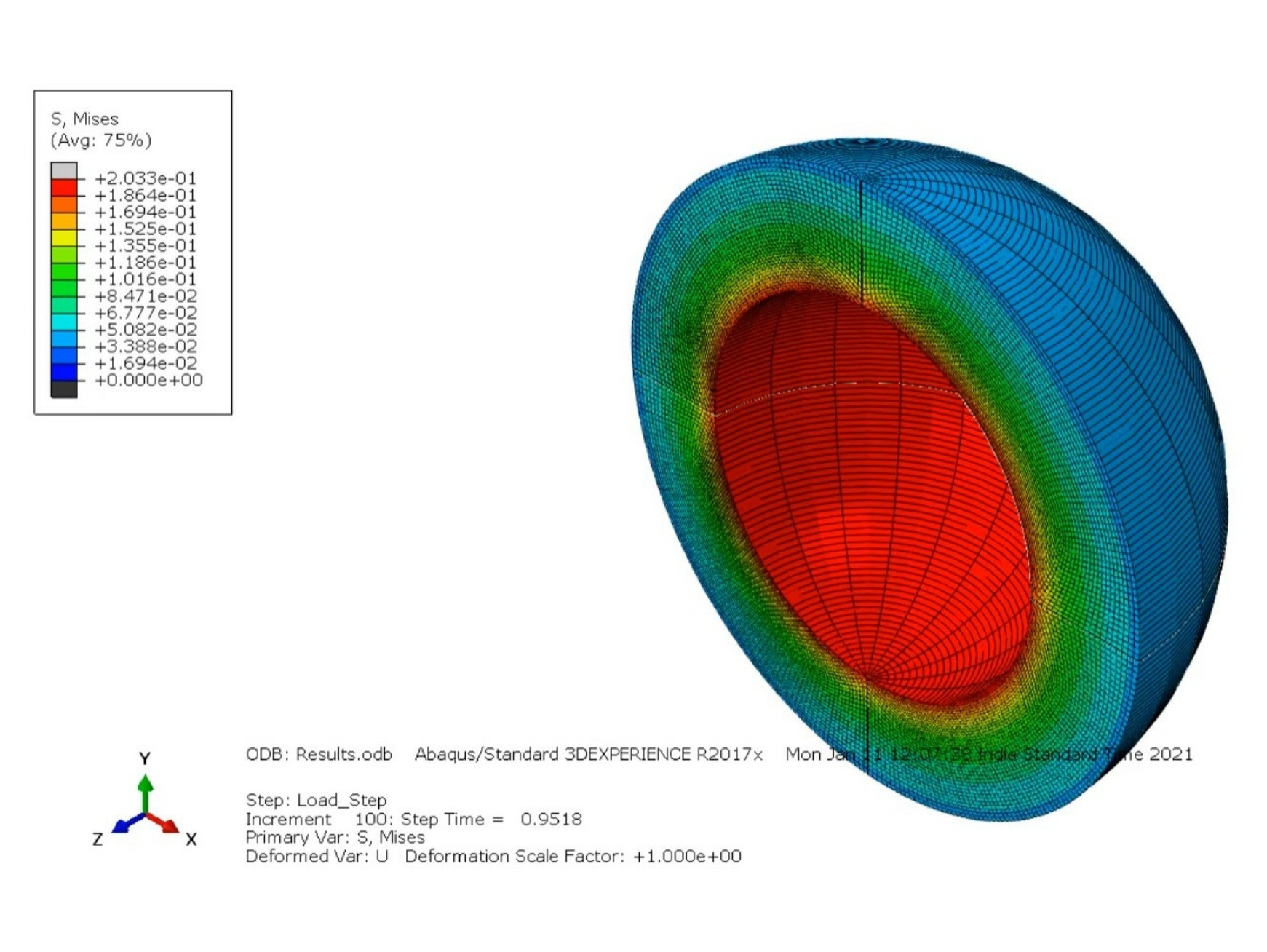
Abstract
This project involved static modeling and finite element simulation of a spherically-shaped hyperelastic balloon actuator subjected to angular rotation and
internal air pressure. Spherical actuators have application in soft robotics and for haptic feedback in robot assisted surgeries.
Skills involved:
- Abaqus CAE
- MATLAB
- Fortran